Kredit: Universitas Washington
Pada awal pandemi COVID-19, pembuat mobil seperti Ford dengan cepat mengalihkan fokus produksi mereka dari mobil ke masker dan ventilator.
Untuk memungkinkan perubahan ini, perusahaan-perusahaan ini mengandalkan orang-orang yang bekerja di jalur perakitan. Akan terlalu sulit bagi robot untuk melakukan transisi ini karena robot terikat dengan tugas mereka yang biasa.
Secara teoritis, robot dapat mengambil hampir semua hal jika grippernya dapat ditukar untuk setiap tugas. Untuk menghemat biaya, gripper ini bisa pasif, artinya gripper mengambil benda tanpa mengubah bentuk, mirip dengan cara kerja gripper di forklift.
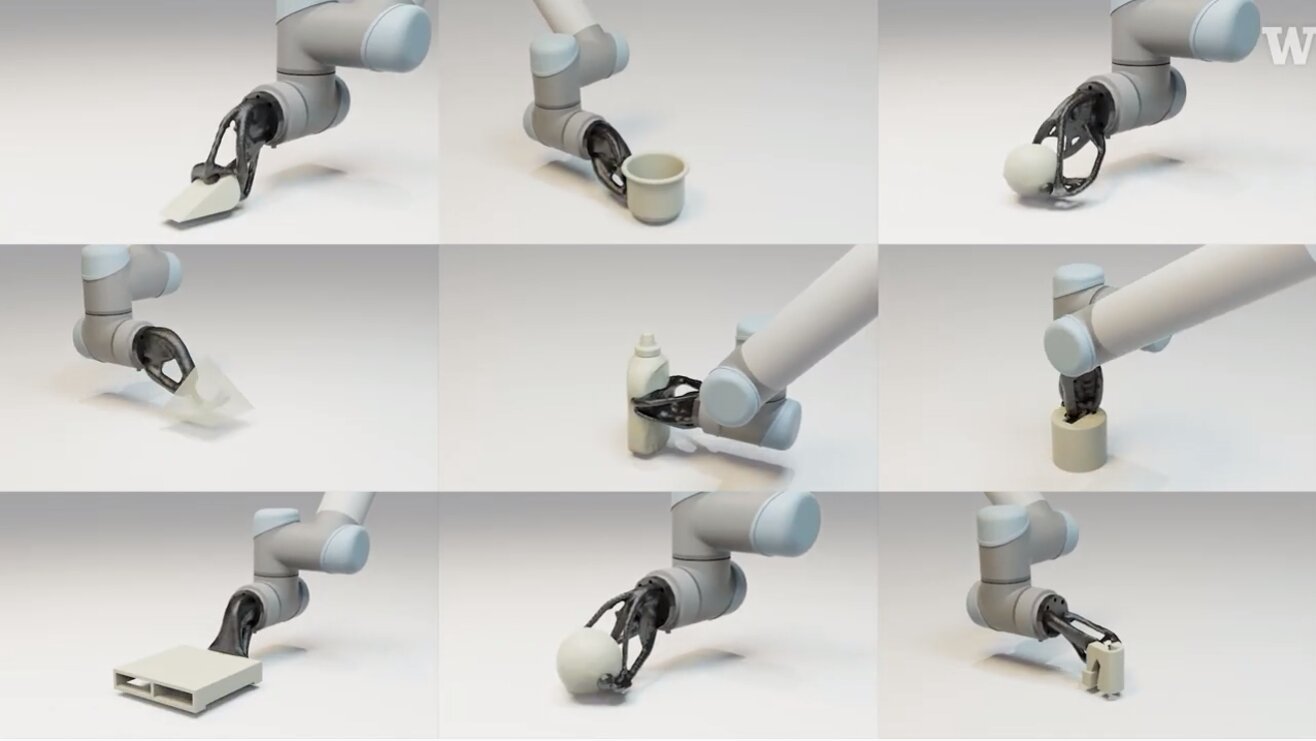
Sebuah tim dari University of Washington telah menciptakan alat baru yang mampu merancang gripper pasif yang dapat dicetak 3D dan menghitung jalur terbaik untuk mengambil objek. Tim menguji sistem ini pada 22 objek, termasuk kelinci yang dicetak 3D, baji penghenti pintu, bola tenis, dan bor. Grippers dan jalur yang dirancang berhasil untuk 20 objek. Dua di antaranya berbentuk baji dan piramida dengan lubang kunci melengkung. Kedua bentuk tersebut sulit dipahami untuk beberapa jenis tang.
Tim akan mempresentasikan hasil ini pada 11 Agustus di SIGGRAPH 2022.
“Kami masih memproduksi sebagian besar barang kami dengan jalur perakitan, yang benar-benar hebat tetapi juga sangat kaku. Pandemi telah menunjukkan kepada kami bahwa kami perlu memiliki cara untuk dengan mudah menggunakan kembali jalur produksi ini,” kata penulis utama Adriana Schulz, UW asisten profesor di Paul G. Allen School of Computer Science & Engineering berkata, “Ide kami adalah membuat perkakas khusus untuk lini manufaktur ini. Ini memberi kami robot yang sangat sederhana yang dapat melakukan tugas dengan gripper tertentu. Dan kemudian ketika saya ganti tugas, saya cukup ganti gripper.
Gripper pasif tidak dapat beradaptasi dengan objek yang mereka pegang, jadi secara tradisional objek telah dirancang agar sesuai dengan gripper tertentu.
“Gripper pasif dengan performa terbaik di dunia adalah forklift gripper. Tetapi trade-off adalah bahwa forklift gripper hanya bekerja dengan baik dengan bentuk tertentu, seperti palet, yang berarti apa pun yang ingin Anda ambil harus berada di atas palet,” kata rekan penulis Jeffrey Lipton. , asisten profesor teknik mesin di UW . “Di sini kami mengatakan ‘Oke, kami tidak ingin mendefinisikan terlebih dahulu geometri gripper pasif.’ Sebagai gantinya, kami ingin mengambil geometri objek apa pun dan mendesain gripper.
Untuk objek apa pun, ada banyak kemungkinan seperti apa bentuk grippernya. Selain itu, bentuk gripper terkait dengan lintasan yang diambil oleh lengan robot untuk menggenggam objek. Jika dirancang dengan buruk, gripper bisa menabrak objek dalam perjalanan untuk mengambilnya. Untuk memenuhi tantangan ini, para peneliti memiliki beberapa ide kunci.
“Titik kontak gripper dengan objek sangat penting untuk menjaga stabilitas objek dalam grip. Kami menyebut rangkaian poin ini sebagai ‘pola menggenggam,’” kata penulis utama Milin Kodnongbua, yang menyelesaikan penelitian ini sebagai mahasiswa sarjana UW di Allen School. “Selain itu, gripper harus menyentuh objek pada titik-titik yang diberikan ini, dan gripper harus berupa benda padat tunggal yang menghubungkan titik kontak ke lengan robot. Kami dapat mencari lintasan wafer yang memenuhi persyaratan ini. .
Saat merancang gripper dan lintasan baru, tim memulai dengan menyediakan komputer dengan model 3D objek dan orientasinya di luar angkasa – bagaimana tampilannya di treadmill, misalnya.
“Algoritme kami pertama-tama menghasilkan kemungkinan konfigurasi pegangan dan memberi peringkat berdasarkan stabilitas dan metrik lainnya,” kata Kodnongbua. “Kemudian dibutuhkan opsi terbaik dan pengoptimalan bersama untuk menentukan apakah lintasan penyisipan dimungkinkan. Jika tidak menemukannya, ia berpindah ke konfigurasi tap berikutnya pada daftar dan mencoba untuk mengulang optimasi bersama.
Setelah komputer menemukan kecocokan yang cocok, komputer mengeluarkan dua set instruksi: satu untuk printer 3D untuk membuat gripper dan satu lagi dengan lintasan untuk lengan robot setelah gripper dicetak dan dipasang.
Tim memilih berbagai objek untuk menguji kekuatan metode, termasuk beberapa dari kumpulan data objek yang standar untuk menguji kemampuan robot untuk melakukan tugas manipulatif.
“Kami juga merancang objek yang akan sulit untuk robot gripper tradisional, seperti objek dengan sudut sangat rendah atau objek dengan pegangan internal, di mana Anda harus mengambilnya dengan memasukkan kunci,” kata rekan penulis Ian Good, seorang mahasiswa PhD UW di departemen teknik mesin.
Para peneliti melakukan 10 mic uji dengan 22 bentuk. Untuk 16 bentuk, semua 10 mikrofon lolos. Sementara sebagian besar formulir memiliki setidaknya satu pengambilan yang berhasil, dua tidak. Kegagalan ini dihasilkan dari masalah dengan model 3D dari objek yang diberikan ke komputer. Untuk – mangkuk – model menggambarkan sisi mangkuk lebih tipis dari sebelumnya. Untuk yang lainnya, sebuah objek yang terlihat seperti cangkir dengan pegangan berbentuk telur, modelnya memiliki orientasi yang salah.
Algoritme mengembangkan strategi mencengkeram yang sama untuk objek berbentuk serupa, bahkan tanpa campur tangan manusia. Para peneliti berharap ini berarti mereka akan dapat membuat gripper pasif yang dapat mengambil kelas objek, daripada harus memiliki gripper unik untuk setiap objek.
Keterbatasan metode ini adalah bahwa gripper pasif tidak dapat dirancang untuk mengambil semua objek. Meskipun lebih mudah untuk mengambil benda yang lebarnya bervariasi atau memiliki tepi yang menonjol, benda dengan permukaan yang rata, seperti botol air atau kaleng, sulit untuk dipegang tanpa bagian yang bergerak.
Namun, para peneliti didorong untuk melihat algoritme bekerja dengan sangat baik, terutama dengan beberapa bentuk yang lebih sulit, seperti kolom dengan lubang kunci di bagian atas.
“Jalur yang dibuat oleh algoritme kami untuk itu adalah akselerasi cepat ke tempat yang benar-benar dekat dengan objek. Sepertinya itu akan menabrak objek, dan saya pikir, “Oh tidak. Bagaimana jika kita ‘tidak dikalibrasi kan?,” kata Good. “Dan kemudian, tentu saja, itu menjadi sangat dekat dan mengambilnya dengan sempurna. Itu adalah momen yang luar biasa, emosi yang luar biasa seperti rollercoaster.
Yu Lou, yang menyelesaikan penelitian ini sebagai mahasiswa master di Sekolah Allen, juga merupakan rekan penulis artikel ini.
Para peneliti mengembangkan tang serbaguna untuk masyarakat tanpa kontak
Milin Kodnongbua dkk, Desain Komputasi Pasif Grippers, Transaksi ACM pada grafik (2022). DOI: 10.1145/3528223.3530162
Mengutip:
Bagaimana membantu robot di jalur perakitan memindahkan gigi dan mengambil hampir semua hal (2022, 28 Juli)
diambil 28 Juli 2022
dari https://techxplore.com/news/2022-07-assembly-line-robots-shift-gears.html
Dokumen ini tunduk pada hak cipta. Selain penggunaan wajar untuk tujuan studi atau penelitian pribadi, tidak
setiap bagian dapat direproduksi tanpa izin tertulis. Konten disediakan hanya untuk informasi.

“Ninja internet yang tak tersembuhkan. Ahli daging. Sangat introvert. Analis. Pakar musik. Pendukung zombie.”